









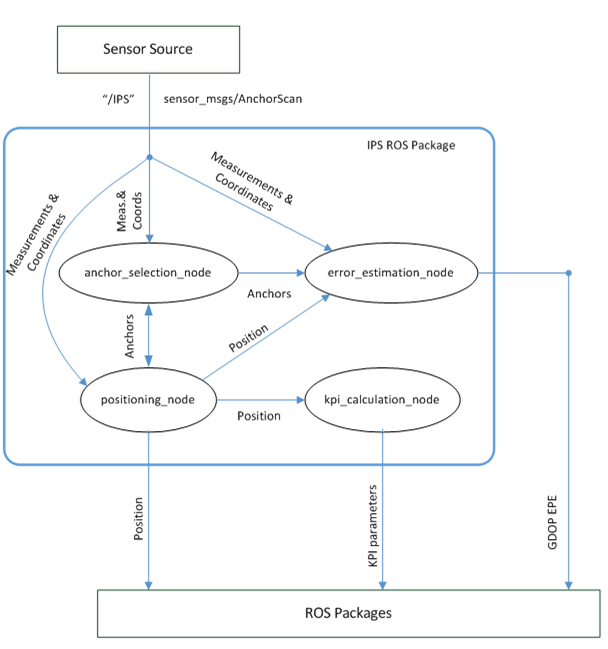
开源软件名称(OpenSource Name):inomuh/indoor_localization开源软件地址(OpenSource Url):https://github.com/inomuh/indoor_localization开源编程语言(OpenSource Language):Python 96.2%开源软件介绍(OpenSource Introduction):indoor_localizationROS Industrial Indoor Positioning SystemThe objective of this project is to develop an open source generic ROS package for absolute indoor positioning. In order to make the ROS package sensor independent, a specific message type called sensor_msgs/AnchorScan that includes the coordinates and TDOA measurements of the anchors from which signal received will be defined. At the end of the project, an open source generic ROS package and necessary indoor algorithms will be developed for indoor positioning system developers and users. This ROS package will be compatible with other ROS stacks and packages like robot_localization, move_base, navigation etc. In addition, in this ROS package, a ROS node will be developed for the calculation of KPI parameters. Maintenance for the package will be supported by Inovasyon Muhendislik Ltd. IPS ROS Package Setup
AcknowledgementROSinPS project is developed by Inovasyon Muhendislik Ltd. (http://www.inovasyonmuhendislik.com) Supported by ROSIN - ROS-Industrial Quality-Assured Robot Software Components. This project has received funding from the European Union’s Horizon 2020 
|

2023-10-27
2022-08-15
2022-08-17
2022-09-23
2022-08-13

六六分期app的软件客服如何联系?不知道吗?加qq群【895510560】即可!标题:六六分期
今天小编告诉大家如何处理win10系统火狐flash插件总是崩溃的问题,可能很多用户都不知

今天小编告诉大家如何对win10系统删除桌面回收站图标进行设置,可能很多用户都不知道
今天小编告诉大家如何对win10系统电脑设置节能降温的设置方法,想必大家都遇到过需要
我们在使用xp系统的过程中,经常需要对xp系统无线网络安装向导设置进行设置,可能很多
今天小编告诉大家如何处理win7系统玩cf老是与主机连接不稳定的问题,可能很多用户都不
电脑对日常生活的重要性小编就不多说了,可是一旦碰到win7系统设置cf烟雾头的问题,很
我们在日常使用电脑的时候,有的小伙伴们可能在打开应用的时候会遇见提示应用程序无法
今天小编告诉大家如何对win7系统打开vcf文件进行设置,可能很多用户都不知道怎么对win
今天小编告诉大家如何对win10系统s4开启USB调试模式进行设置,可能很多用户都不知道怎







请发表评论