









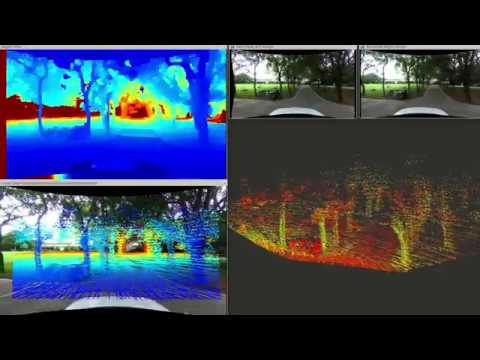
开源软件名称(OpenSource Name):tony1098/Stereo-Localization-in-LiDAR-Maps开源软件地址(OpenSource Url):https://github.com/tony1098/Stereo-Localization-in-LiDAR-Maps开源编程语言(OpenSource Language):C++ 81.4%开源软件介绍(OpenSource Introduction):Stereo Localization in LiDAR MapsVisual localization method in LiDAR maps. Only a stereo camera is need during localization since the LiDAR map can be built offline. 1. Prerequisites1.1 ROS 1.2 Sophus (Lie algebra library) 2. BuildThe repository is a catkin package. To build, clone the repository and catkin_make: 3. Setup / RunTo run the package The config file is located at res/config.yaml. Visualization information can be seen in rviz. Also, since the localization is unable to run in real-time, the bag should NOT be played all in one go since it could result in overflowing the image buffer. That is, you may have to pause playing the bag so that the localization can catch up. 4. DemoThe localization method can be tested on 2018-06-23-12-46-26_0.bag without any modifications to the config file. The corresponding LiDAR map is located at res/2018-06-23-12-46-26_0_z-filtered_4m.pcd. Video: (spedup) 5. Future Work5.1 The current localization depends on matching the stereo depth map to the LiDAR map. For more open scenes with faraway structures, good estimation of stereo depth is difficult. A possible solution is to use sparse but reliable 3D features computed from VIO directly for matching. This should speed up the localization runtime as well. 5.2 Currently, the localization can use the pose from VIO as an initial guess to further optimize the VIO pose using the LiDAR map. After optimization, the pose of VIO can be shifted directly according to the optimized transformation. One possible future work is to tightly-couple VIO and the LiDAR map based localization so that the entire VIO state vector is updated with each localization. 
|

2023-10-27
2022-08-15
2022-08-17
2022-09-23
2022-08-13

六六分期app的软件客服如何联系?不知道吗?加qq群【895510560】即可!标题:六六分期
今天小编告诉大家如何处理win10系统火狐flash插件总是崩溃的问题,可能很多用户都不知

今天小编告诉大家如何对win10系统删除桌面回收站图标进行设置,可能很多用户都不知道
今天小编告诉大家如何对win10系统电脑设置节能降温的设置方法,想必大家都遇到过需要
我们在使用xp系统的过程中,经常需要对xp系统无线网络安装向导设置进行设置,可能很多
今天小编告诉大家如何处理win7系统玩cf老是与主机连接不稳定的问题,可能很多用户都不
电脑对日常生活的重要性小编就不多说了,可是一旦碰到win7系统设置cf烟雾头的问题,很
我们在日常使用电脑的时候,有的小伙伴们可能在打开应用的时候会遇见提示应用程序无法
今天小编告诉大家如何对win7系统打开vcf文件进行设置,可能很多用户都不知道怎么对win
今天小编告诉大家如何对win10系统s4开启USB调试模式进行设置,可能很多用户都不知道怎







请发表评论