









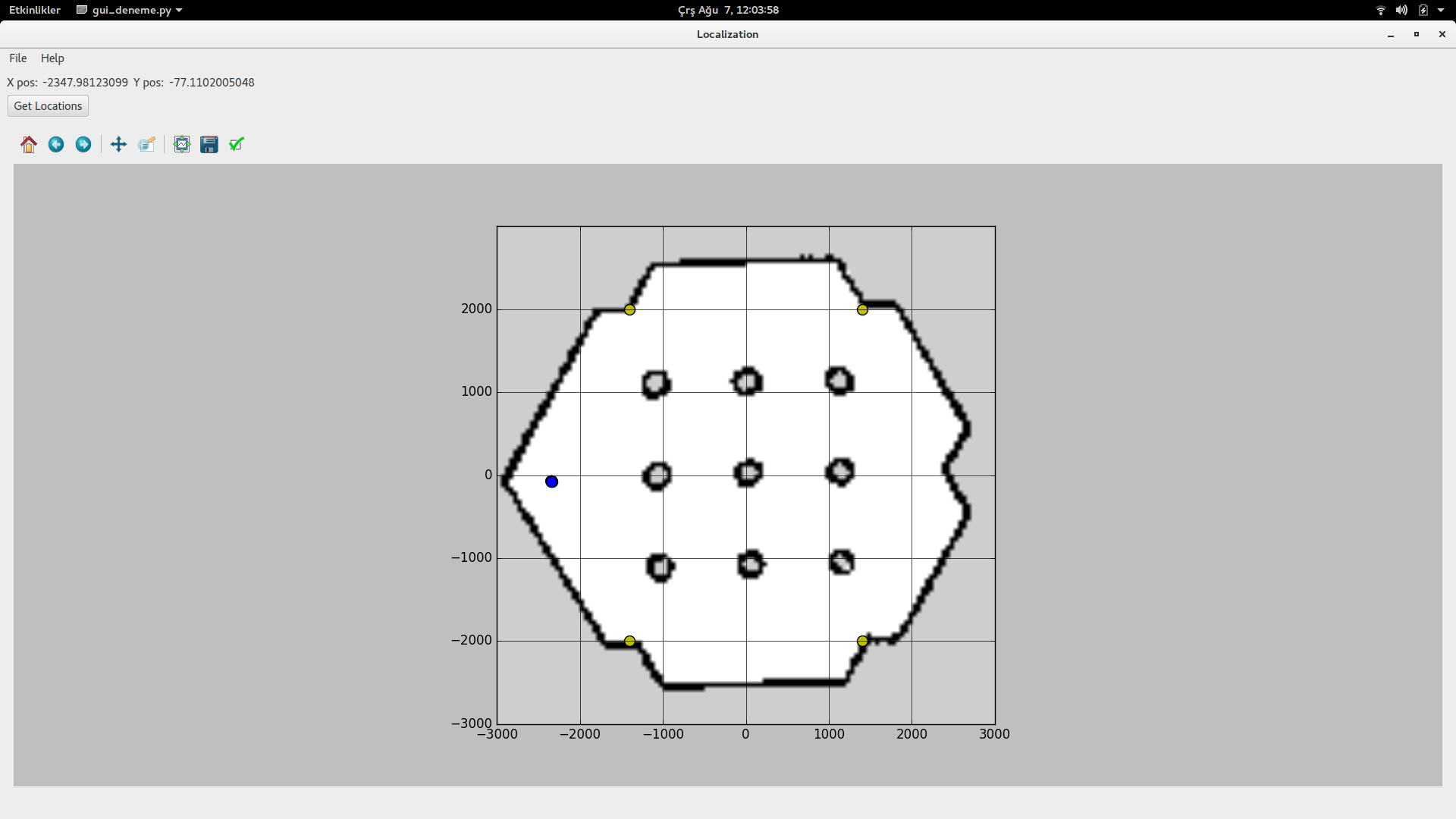
开源软件名称(OpenSource Name):advoard/advoard_localization开源软件地址(OpenSource Url):https://github.com/advoard/advoard_localization开源编程语言(OpenSource Language):Python 81.4%开源软件介绍(OpenSource Introduction):ROS ADVOARD AGV LocalizationIn this project we aimed to develop a system that works in ROS environment and can localize itself. These packages tested under turtlebot3, but it can also be used on any other system that has an Ultra-wideband ranging sensor and odometry sensors mounted. It is also possible to initialize the robot and send the initial pose estimation to navigation stack without the need of manually initializing it on the RViz window but keep in mind that in order to the use this feature LiDAR is required. AMCL also needs an initial pose so this feature is very crucial to have a fully autonomous system. We offer a simulation package with synthetic UWB data for now, but it can be adjusted so that it will be possible to the use it on real life robot with real UWB sensors.
SetupFirst you will need to utilize at least 4 UWB sensors one is mounted on the robot and rest should be placed in a way that it will cover the area of interest where you want to localize your robot. Simulation is possible with the shared scripts. However, this package doesn’t support direct use so slight adjustments on the pozyx scripts are required. So install the package ros_pozyx_simulation and run it before rosrun pozyx_simulation uwb_simulation.py rostopic echo /uwb_data_topic After you confirm that uwb_data_topic is available in ROS you can use this project How to Run LocalizationThis project includes 2 different localization algorithms and they use different sensory information.
Kalman Filterrosrun advoard_localization kalman_filter_localization.py Source Localizationrosrun advoard_localization sqrrange_leastsqr_localization.py How to Run Initial Pose EstimationThere are 2 different initial pose estimation algorithms in this repository. First one uses LiDAR measurement, preconstructed map and UWB range measurements. Second one only uses UWB sensor and the vehicle must move 20cm forward to figure out the direction it is facing. (Lidar + Map + UWB Sensor) InitializationThis algorithm uses uwb sensors and odometry so localization_data_topic and odom topics must to be up and running. roslaunch advoard_localization lidar_uwb_initial_pose.launch (UWB Sensor) InitializationThis algorithm uses only uwb sensors so localization_data_topic topic must to be up and running. roslaunch advoard_localization uwb_initial_pose.launch How to Use Localization AlgorithmKalman filter and source localization use same topic thus you must select the one that you want to run because only one of them can run. The topic that mentioned is Pose. In python you can use this topic with writing a subscriber like below. from geometry_msgs.msg import Pose rospy.Subscriber("localization_data_topic", Pose, subscribe_data) def subscribe_data(self,Pose): robot_realtime_pose= Pose

|

2023-10-27
2022-08-15
2022-08-17
2022-09-23
2022-08-13

六六分期app的软件客服如何联系?不知道吗?加qq群【895510560】即可!标题:六六分期
今天小编告诉大家如何处理win10系统火狐flash插件总是崩溃的问题,可能很多用户都不知

今天小编告诉大家如何对win10系统删除桌面回收站图标进行设置,可能很多用户都不知道
今天小编告诉大家如何对win10系统电脑设置节能降温的设置方法,想必大家都遇到过需要
我们在使用xp系统的过程中,经常需要对xp系统无线网络安装向导设置进行设置,可能很多
今天小编告诉大家如何处理win7系统玩cf老是与主机连接不稳定的问题,可能很多用户都不
电脑对日常生活的重要性小编就不多说了,可是一旦碰到win7系统设置cf烟雾头的问题,很
我们在日常使用电脑的时候,有的小伙伴们可能在打开应用的时候会遇见提示应用程序无法
今天小编告诉大家如何对win7系统打开vcf文件进行设置,可能很多用户都不知道怎么对win
今天小编告诉大家如何对win10系统s4开启USB调试模式进行设置,可能很多用户都不知道怎







请发表评论